Принцип действия простейшего электродвигателя. Принцип действия электродвигателя
Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение - создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу - лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Рисунок 1 – Машина постоянного тока:
I - вал; 2 - передний подшипниковый щит; 3 - коллектор; 4 - щеткодержатель; 5 - сердечник якоря с обмоткой; б - сердечник главного полюса; 7 - полюсная катушка; 8 - станина; 9 - задний подшипниковый щит; 10 - вентилятор; 11 - лапы; 12 - подшипник 
Рисунок 2 – Полюса машины постоянного тока:
а - главный полюс; б - дополнительный полюс; в - обмотка главного полюса; г - обмотка дополнительного полюса; 1 - полюсный наконечник; 2 - сердечник
В полюсах различают сердечник и наконечник (рисунок 2). На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
Якорь машины постоянного тока состоит из вала, сердечника, обмотки и коллектора. Сердечник якоря собирается из штампованных листов электротехнической стали толщиной 0,5 мм и спрессовывается с обеих сторон с помощью нажимных шайб. В машинах с радиальной системой вентиляции листы сердечника собираются в отдельные пакеты толщиной 6-8 см, между которыми делают вентиляционные каналы шириной 1 см. При осевой вентиляции в сердечнике выполняют отверстие для прохождения воздуха вдоль вала. На внешней поверхности якоря имеются пазы для обмотки. 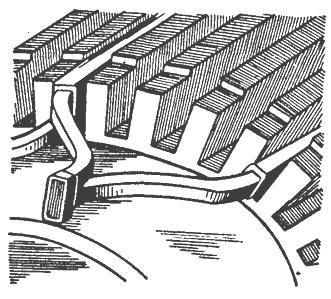
Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде заранее выполненных секций (рисунок 3). Они укладываются в пазы, где тщательно изолируются. Обмотку делают двухслойной: размещают в каждом пазу две стороны разных якорных катушек - одну над другой. Обмотку закрепляют в пазах клиньями (деревянными, гетинаксовыми или текстолитовыми), а лобовые части крепят специальным проволочным бандажом. В некоторых конструкциях клинья не применяют, а обмотку крепят бандажом. Бандаж изготовляют из немагнитной стальной проволоки, которая наматывается с предварительным натяжением. В современных машинах для бандажировки якорей используют стеклянную ленту.
Коллектор машины постоянного тока собирается из клиноподобных пластин холоднокатаной меди. Пластины изолируют одну от другой прокладками из коллекторного миканита толщиной 0,5 - 1 мм. Нижние (узкие) края пластин имеют вырезы в виде "ласточкина хвоста", которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность "ласточкина хвоста", при втором - на "ласточкин хвост" и конец пластины.
Коллекторы с первым способом крепления называют арочными, со вторым - клиновыми. Наиболее распространены арочные коллекторы.
В коллекторных пластинах со стороны якоря при небольшой разнице в диаметрах коллектора и якоря делают выступы, в которых фрезеруют прорези (шлицы). В них укладывают концы обмотки якоря и припаивают оловянистым припоем. При большой разнице в диаметрах припайка к коллектору делается с помощью медных полосок, которые называются "петушками".
В быстроходных машинах большой мощности для предотвращения выпучивания пластин под действием центробежных сил применяют внешние изолированные бандажные кольца.
Щеточный аппарат состоит из траверсы, щеточных пальцев (болтов), щеткодержателей и щеток. Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Щеткодержатель состоит из обоймы, в которую помещается щетка, рычага для прижима щетки к коллектору и пружины. Давление на щетку составляет 0,02 - 0,04 МПа.
Для соединения щетки с электрической цепью имеется гибкий медный тросик.
В машинах малой мощности применяют трубчатые щеткодержатели, которые крепят в подшипниковом щите. Все щеткодержатели одной полярности соединяются между собой сборными шинами, которые подключаются к выводам машины.
Щетки (рисунок 4) в зависимости от состава порошка, способа изготовления и физических свойств разделяют на шесть основных групп: угольно-графитовые, графитовые, электрографитовые, медно-графитовые, бронзографитовые и серебряно-графитовые.
Подшипниковые щиты электрической машины служат в качестве соединительных деталей между станиной и якорем, а также опорной конструкцией для якоря, вал которого вращается в подшипниках, установленных в щитах. 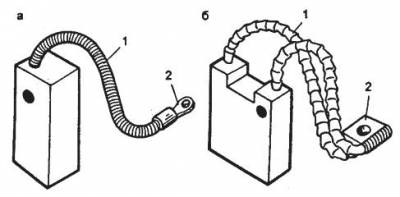
Рисунок 4 – Щетки:
а - для машин малой и средней мощности; б - для машин большой мощности; 1 - щеточный канатик; 2 - наконечник
Различают обычные и фланцевые подшипниковые щиты.
Подшипниковые щиты изготовляют из стали (реже из чугуна или алюминиевых сплавов) методом литья, а также сварки или штамповки. В центре щита делается расточка под подшипник качения: шариковый или роликовый. В машинах большой мощности в ряде случаев используют подшипники скольжения.
В последние годы статор двигателей постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются ярмо, пазы, главные и добавочные полюса.
Электродвигателем называется устройство, принцип действия которого преобразование электрической энергии в механическую. Такое преобразование используется для запуска в работу всевозможных видов техники, начиная от самого простого рабочего оборудования и заканчивая автомобилями. Однако при всей полезности и продуктивности такого преобразования энергий, в данном свойстве есть небольшой побочный эффект, который проявляется в повышенном выделении тепла. Именно поэтому электрические двигатели оснащаются дополнительным оборудованием, которое способно охладить его и позволить работать в бесперебойном режиме.
Принцип работы электродвигателя - основные функциональные элементы
Любой электрический двигатель состоит из двух основных элементов, один из которых является неподвижным, такой элемент называется статором. Второй элемент является подвижным, эта часть двигателя называется ротором. Ротор электрического двигателя может быть выполнен в двух вариантах, а именно может быть короткозамкнутым и с обмоткой. Хотя последний тип на сегодняшний день является достаточно большой редкостью, поскольку сейчас повсеместно используются такие устройства, как .
Принцип действия электродвигателя основана на выполнении следующих этапов работы. Во время включения в сеть, в статоре начинает осуществлять вращение возникшее поле магнитного типа. Оно действует на обмотку статора, в которой при этом возникает ток индукционного типа. Согласно закону Ампера, ток начинает действовать на ротор, который под этим действием начинает свое вращение. Непосредственно частота вращения ротора напрямую зависит от того, какой силы действия возникает ток, а так же от того, какое количество полюсов при этом возникает.
Принцип работы электродвигателя - разновидности и типы
На сегодняшний день наиболее распространенными считаются двигатели, которые имеют магнитоэлектрический тип. Есть еще тип электродвигателей, которые называют гистерезисные, однако они не являются распространенными. Первый тип электродвигателей, магнитоэлектрического вида, могут подразделяться еще на два подтипа, а именно электродвигатели постоянного тока и двигатели переменного тока.
Первый вид двигателей осуществляет свою работу от постоянного тока, эти типы электродвигателей используются тогда, когда возникает необходимость регулировки скоростей. Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.
Двигатели переменного тока соответственно работают посредством действия тока переменного типа. Здесь так же имеется своя классификация, и двигатели делятся на синхронные и асинхронные. Их основным различием становится разница во вращении необходимых элементов, в синхронном движущая гармоника магнитов движется с той же скоростью, что и ротор. В наоборот, ток возникает за счет разницы в скоростях движения магнитных элементов и ротора.
Благодаря своим уникальным характеристикам и принципам действия электродвигатели на сегодняшний день распространенны гораздо больше, чем скажем двигатели внутреннего сгорания, поскольку они обладают рядом преимуществ перед ними. Так коэффициент полезного действия электродвигателей является очень высоким, и может достигать почти 98%. Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
Двигатели электрические выпускают синхронные, асинхронные, коллекторные, каждому присущи особенности работы. Минус большой: сеть интернет дает скудные представления о различиях в работе, принципе действия. Можем читать обзоры про синхронные электродвигатели, не понять в итоге главного: нюансов! Почему на ГЭС используются такие генераторы, в быту моторов-зеркал не видно (двигатель переменного тока обратим)?
Электрические двигатели: разновидности
Сразу скажем, не ставили целью довести вниманию читателей исчерпывающую информацию по указанной теме. Невозможно объять необъятное. Будут рассматриваться случаи, опущенные литературой. Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.
Коллекторные двигатели
Часто путают с синхронными. Обнаруживаются угольные щетки. Этим сходство ограничивается, частота вращения коллекторных двигателей меняется в широких пределах, каждый может лицезреть на примере стиральной машины. Управление скоростью осуществляется путем коммутации обмоток, подстройкой значения действующего напряжения (изменяется угол отсечки вольтажа промышленной частоты).
Главным отличием устройств является наличие коллектора. Своеобразная секционная конструкция, насаженная на вал. Составлена множеством катушек, равномерно идущих кругом. Коллектор обеспечивает последовательную коммутацию, чтобы поле постепенно двигалось вкруг вала. Цепляясь за статор, ротор начинает движение.
К недостаткам коллекторных двигателей причисляют хрупкость (для промышленности). В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды). Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
Можно поставить вместо него магнит, вращать поле статора? Да, получим синхронный двигатель (типичный пример - помпы стиральных машин). Можно питать обмотку постоянным током, вращать поле статора? Да, будет синхронный двигатель. Видите, коллектор однозначно дает понять тип устройства.
Асинхронные двигатели
Чаще применяются промышленностью. Получаем простоту конструкции, кучу плюшек. Ударопрочность, вибропрочность: отсутствие угольных щеток. Взамен получается кипа конструкций. Семейство самое многочисленное.
Во-первых, ротор. Может быть короткозамкнутым, фазным. Первое означает: на вал насажена конструкция (для уменьшения веса силуминовая), где вставлены прожилки меди. Закорочено периметром двумя кольцами. Получается барабан, иногда называемый беличьей клеткой.
Возникает поле под действием вращающейся ЭДС статора, в отличие от коллекторных запуск асинхронных двигателей постоянным током не производят. Вторичное отличие. Первичное назвали: к ротору не подходят контакты (исключая пусковой реостат), вал увенчан беличьей клеткой, вывод о принадлежности однозначный. Что касается фазных асинхронных машин, питание катушек ротора производится через токосъемные кольца. Вал подхватывается, постепенно набирает обороты.
Синхронные двигатели
Тип устройств, составить понятие о котором, согласно заметкам сети попросту невозможно. Отличие простое: поле настолько сильное, что захватывается без проблем, не проскальзывает, как в случае с асинхронными или (в меньшей степени) коллекторными двигателями. Обеспечивается постоянным магнитом чаще, либо обмотка возбуждения находится на роторе. Статор снабжается переменным напряжением нужной частоты.
Скорость вращения зависит от частоты сети питания. Полюсов только два, поэтому составляет 25 Гц (1500 об/мин). Черта, по которой можно предположить: видим синхронный двигатель - кратное, целое число. Ключевым является совпадение скорости вращения вала и частоты напряжения питания. Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Как работают электрические двигатели
Асинхронные двигатели
Кратенько описали внешние отличия электрических двигателей, теперь пара слов по поводу устройства и функционирования. Асинхронные двигатели при помощи статора создают по оси вращающееся магнитное поле. Барабан беличьей клетки редко изготавливается из ферромагнитных материалов (если вообще имеет место быть). В противном случае нагрев вышел бы значительным. Фактически получается индукционная печь.
Силуминовый барабан вдоль линий магнитного поля содержит медные проводники. Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
На запуске частота тока, глубина проникновения поля велики. Включаются в работу оба слоя беличьей клетки. По мере разгона разница нивелируется, падает до нуля. Амплитуда поля снижается, рабочим остается внешний слой беличьей клетки. Обратите внимание, догнать поле ротор бессилен, проскальзывает, запаздывает. Поэтому двигатели получили название асинхронных. Англичане делают проще - зовут индукционными.
Если поле вращать со скоростью ротора, ЭДС перестает наводиться. Последует замедление, цикл повторится, начавшись разгоном. Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
- Подпитывается электричеством через кольцо токосъемника. Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.
- Подпитывается постоянным током. Образуется синхронный двигатель.
- Снабжается реостатами, дросселями, регулирующими скорость.
- Реализует управление инвертором (усложненный первый случай).
Принцип действия асинхронных двигателей: используется наведенная ЭДС, скорость вращения неспособна догнать поле (пропадают токи). Иначе тип мотора меняется (синхронный). Для регуляции скорости часто используется амплитуда питающего напряжения. Способ годится двигателям асинхронного типа с короткозамкнутым, фазным ротором. Перечислим методики:

- Для машин с короткозамкнутым ротором годятся:
- Регулирование частоты напряжения питания.
- Изменение числа пар полюсов статора. В результате меняется скорость вращения поля, давая нужный эффект.
- Для машин с фазным ротором допускается:
- Вводить реостат в цепь питания. Растут потери на скольжение, закономерно изменяя скорость.
- Применять специальные вентили. Энергия скольжения выпрямляется схемой Ларионова, подается в виде постоянного напряжения вспомогательному электрическому двигателю, нарезающему импульсы через управляемые извне тиристоры. Мощность, которая обычно терялась бы, возвращается. Через вал вспомогательного двигателя, трансформатор, обмотки которого частично включены в сеть питания. Управление скоростью выполняют внедрением дополнительной ЭДС. Делается либо напрямую (через источник питания), либо сдвигом угла включения тиристоров относительно питания. Частота отклоняется от номинала.
- Двигатель двойного питания является вариантом реализации регулировки скорости в оборудовании с фазным ротором. Тип чаще применяется для реализации схем генераторов. Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
Асинхронным двигателям годится изменение амплитуды питания. Наибольшим КПД обладают вентильные схемы, самые дорогие.

Двигатель асинхронного типа
Работа синхронных двигателей
Проходились по коллекторным двигателям – рассказывали, как конструировать – поэтому пропускаем сегодня семейство. Бессильны иначе рассказать вещи гораздо интереснее: ведется много споров на форумах. Собираемся рассмотреть не совсем синхронные двигатели - генератор. Наподобие украшающих ГЭС.
Вы никогда не задумывались, как регулируется скорость вращения турбины, когда на лопасть падает поток воды? Створками направляющего аппарата? Нет. Генератор требует подпитки не только постоянным током, но и переменным. Первое подаётся на ротор, а второе – на статор. В результате вал не мог бы даже стронуться с места, но ему помогает вода. А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
Фактически имеем на руках устройство электродвигателя переменного тока, среди обмоток большая часть генерирующих, снимается частота 50 Гц. Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Вал вращается со скоростью 1-2 оборота в секунду. Многочисленными генераторными обмотками, соединенными параллельно образует нужную форму синусоиды. Подчеркиваем, частота поддерживается напряжением возбуждения, следовательно, именно к нему и предъявляются повышенные требования. Требуется получить больше мощности электростанции, просто заслонки направляющего аппарата приоткрываются, масса воды начинает падать вниз. Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Принцип действия электродвигателя переменного тока копирует сказанное, отсутствуют генераторные обмотки. Требуется получить больше мощности - увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Не успели сегодня рассмотреть технические характеристики электродвигателей переменного тока, многократно делали прежде, применительно к различного рода устройствам. Полагаем, в будущем обзоры могут вновь повернуться к теме бушпритом.
Электродвигатель преобразует электроэнергию в энергию механического движения. Так же как и электрический генератор электродвигатель состоит обычно из статора и ротора, относясь к вращающимся электрическим машинам Выпускаются однако, двигатели у которых движущаяся часть совершает линейное (обычно прямолинейное движение (линейные двигатели).
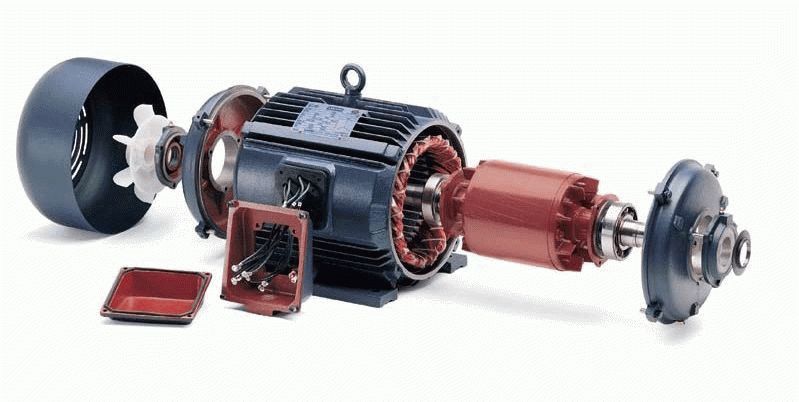
Самым распространенным видом электродвигателей является трехфазный короткозамкнутый асинхронный двигатель принцип устройства которого представлен на рис. 1, роторная обмотка этого двигателя представляет собой систему массивных медных или алюминиевых стержней, размещенных параллельно друг другу в пазах ротора концы которых соединены между собой короткозамкнутыми кольцами.
Рис. 1. Принцип устройства короткозамкнутого асинхронного двигателя.
1- статор, 2 – ротор, 3 - вал, 4 - корпус
В случае применения алюминия вся обмотка (беличья клетка) обычно формируется путем литья под давлением. Вращающееся магнитное поле статора индуцирует в обмотке ротора ток, взаимодействие которого с магнитным полем статора приводит ротор во вращение. Скорость вращения ротора при этом всегда меньше чем магнитного поля статора и ее относительную разность со скоростью вращения магнитного поля статора (с синхронией скоростью) называют скольжением. Эта величина зависит от нагрузки на валу двигателя и составляет при полной нагрузке обычно 3… 5%. Для ступенчатого регулирования скорости может использоваться статорная обмотка с переключаемым числом полюсов по такому принципу могут выполняться, например, двух трех и четырехскоростные асинхронные двигатели. Для плавного регулирования скорости обычно осуществляется питание двигателя через регулируемый преобразователь частоты.
Для главного регулирования скорости асинхронного двигателя ниже номинальной ранее вместо короткозамкнутых двигателе использовались двигатели с фазным ротором, у которых роторная обмотка имеет такое же трехфазное исполнение как и статорная. Такая обмотка соединяется через контактные кольца, расположенные на валу двигателя с регулировочным реостатом где часть энергии потребляемой двигателем, превращается в тепло. Регулирование происходит, следовательно, за счет снижения КПД двигателя и в настоящее время применяется редко.
Короткозамкнутые асинхронные двигатели характеризуются своей компактностью и высокой надежностью, а также намного большим сроком службы, чем двигатели внутреннего сгорания. По размерам они обычно меньше и по массе легче, чем двигатели внутреннего сгорания той же мощности. Они могут изготовляться в очень большом диапазоне номинальных мощностей от нескольких ватт до нескольких десятков мегаватт. Двигатели малой мощности (до нескольких сотен ватт могут быть и однофазными.
Синхронные двигатели устроены так же, как и синхронные генераторы. При неизменной сетевой частоте они вращаются с постоянной скоростью не зависимо от нагрузки. Их преимуществом перед асинхронными двигателями считается то, что они не потребляют из сети реактивную энергию, а могут отдавать ее в сеть покрывая этим потребление реактивной энергии другими электроприемниками. Синхронные двигатели не подходят для частых пусков и применяются, главным образом, при относительно стабильной механической нагрузке и тогда, когда требуется постоянная скорость вращения.
Двигатели постоянного тока
используются при необходимости плавного регулирования скорости. Это достигается путем изменения тока якоря и/или возбуждения при помощи полупроводниковых устройств (раньше - с помощью регулировочных реостатов) или путем изменения напряжения питания. Так как в настоящее время легко и без существенного изменения КПД (при помощи преобразователей частоты) осуществляется и плавное регулирование скорости двигателей переменного тока, то двигатели постоянного тока, из-за их большей стоимости, больших размеров и дополнительных потерь, возникающих при регулировании, стали применяться значительно реже, чем раньше.
Шаговые двигатели приводят в движение при помощи импульсов напряжения. При каждом импульсе ротор двигателя поворачивается на определенный угол (например, на несколько градусов). Такие двигатели используются в тихоходных механизмах, требующих обычно еще точного позиционирования. Могут изготовляться, например, двигатели, совершающие один обо рот за сутки или даже за год.
Линейные двигатели используются для линейного движения, когда преобразование вращающегося движения в линейное при помощи механических передач или других устройств невозможно или неприемлемо. Наиболее часто применяются асинхронные линейные двигатели, но существуют также синхронные и шаговые линейные двигатели и даже двигатели постоянного тока.
Основными преимуществами электрических двигателей перед двигателями внутреннего сгорания могут считаться
- меньшие размеры, меньшая масса и меньшая стоимость,
- намного более высокий КПД (обычно 90 ..95%),
- лучшая регулируемость (обычно с сохранением высокого КПД),
- высокая надежность и долгий срок службы,
- меньший шум и меньшая вибрация при работе,
- быстрый и беспроблемный (при необходимости - плавный) пуск,
- намного более простая эксплуатация,
- отсутствие потребления топлива и, как результат, отсутствие выбросов продуктов сгорания в окружающую среду,
- легкое присоединение к любым рабочим машинам и механизмам.
Применение электродвигателей может оказаться проблемным в случае, когда они должны размещаться на переносных и передвижных устройствах или на транспортных средствах. Для электропитания в таких случаях могут применяться, в зависимости от дальности и характера передвижения,
- гибкие кабели,
- контактные провода или контактные шины,
- размещаемые на передвижных средствах источники питания (аккумуляторы, топливные элементы, двигатель-генераторы и т. п.).
Во многих случаях эти способы питания ограничивают маневренность или дальность пробега транспортных средств (особенно автомобилей) или других передвижных машин в такой степени что применение двигателей внутреннего сгорания остается более рациональным. Первый электродвигатель был не электромагнитным, а электростатическим и его изготовил в 1748 году издатель и общественный деятель города Филадельфия (Philadelphia, США) Бенджамин Франклин (Benjamin Franklin, 1706-1790). Ротор этого двигателя представлял собой зубчатый диск, на зубья которого действовали импульсные силы притяжения и отталкивания, вызываемые электростатическими разрядами, диск совершал 12...15 оборотов в минуту и мог нести до 100 серебряных монет. Первые электромагнитные двигатели (приборы, в которых либо проводник, через который протекал ток вращался вокруг стержневого магнита (рис. 2), совершая при этом работу - перемешивая ртуть, либо стержневой магнит вращался вокруг проводника с током, изобрел в 1821 году ассистент Лондонского Королевского института (Royal Institution) Майкл Фарадей (Michael Faraday).
Рис. 2. Принцип устройства опытного прибора Майкла Фарадея для демонстрации электрического вращения.
1 - вращающийся металлический стержень, 2 - стержневой магнит, 3 - стеклянный или фарфоровый сосуд, 4 - ртуть, 5 – уплотнение, i - ток
Первый (качающийся) двигатель, который, в принципе, можно было бы соединить с приводимой рабочей машиной, изготовил в 1831 году учитель математики и природоведения школы мальчиков города Албани (Albany, США) Джозеф Генри (Joseph Henry, 1797-1878); принцип устройства этого двигателя представлен на рис. 3.
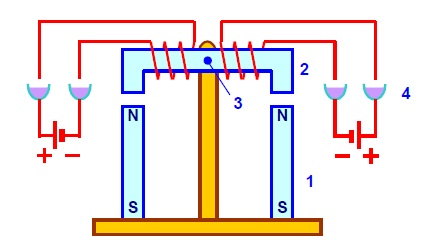
Рис. 3. Принцип устройства качающегося электродвигателя Джозефа Генри.
1 - постоянные магниты, 2 - качающийся электромагнит, 3 - вал, 4 - ртутные контакты.
После двигателя Генри было создано еще несколько различных опытных электродвигателей возвратно-поступательного движения. Первый вращающийся электродвигатель создал с целью реального применения 8 апреля 1834 года инспектор порта Пиллау rPiilau, Восточная Пруссия), инженер-строитель Мориц Герман Яко6и (Moritz Hermann Jacobi. 1801-1874), изучавший самостоятельно электротехнику в библиотеке и в лабораториях Кенигсбергского университета. Восьмиполюсный двигатель, у которого как статор, так и ротор состояли из четырех подковообразных электромагнитов и который совершал 80… 120 оборотов в минуту, получал питание из батареи гальванических элементов напряжением 6V. Мощность его на валу была приблизительно 15 W а КПД - около 13%. Якоби исследовал и совершенствовал свои двигатель, между прочим, в Тартуском университете, профессором гражданской архитектуры которого он был избран в 1835 году.
Мориц Герман (позже, в России - Борис Семенович) Якоби родился в 1801 году в Потсдаме (Potsdam, Германия) в зажиточной семье и получил хорошее домашнее образование; уже в юношестве он одинаково свободно владел немецким, английским и французским языками и отлично знал также латынь и древнегреческий язык. В 1828 году он окончил Геттингенский университет (Gottingen Германия) с квалификацией архитектора, работал затем на строительстве дорог, а в 1833 году переехал в Кенигсберг, где его младший брат Карл Густав Яков Якоби (Carl Gustav Jacob Jacobi, 1804-1851) был профессором математики. Он стал работать инспектором порта Пиллау и посещать Кенигсбергский университет для приобретения знаний по электротехнике. В 1834 году он построил вышеупомянутый двигатель, а в 1835 году, по инициативе профессора астрономии Тартуского университета Фридриха Георга Вильгельма Струве (Friedrich Georg Wilhelm Struve, 1793-1864) он был избран профессором гражданской архитектуры этого университета. Его двигатель вызвал интерес в Петербурге, и в 1837 году Якоби был прикомандирован к столичной Академии Наук для разработки электропривода военных кораблей, оставаясь до 1840 года официально на службе в Тартуском университете. В 1838 году Якоби испытал на Неве первый в мире электропривод с вращающимся двигателем (установленный на морском боте), но дальнейшие исследования показали, что для электропитания привода, к сожалению, нет технически и экономически пригодного источника энергии.
В 1839 году Якоби был избран членом-корреспондентом, а в 1842 году - членом Академии Наук и в дальнейшем занимался, в основном, развитием электромагнитного телеграфа, гальванотехники и метрологии. Неоднократно он встречался с Майклом Фарадеем, известными французскими и немецкими физиками того времени.
В середине 19-го века было разработано еще несколько разновидностей двигателей постоянного тока, но их практическому применению воспрепятствовали малая мощность и, как установил уже Якоби, недостаточная экономическая эффективность источников электропитания того времени - гальванических элементов и примитивных электромашинных генераторов. Более широко применение электродвигателей стало возможным только в 1866 году после появления генераторов постоянного тока с самовозбуждением.
После появления многофазной системы переменного тока немецкая фирма АЭГ стала исследовать возможности использования асинхронных двигателей, изобретенных ее главным инженером Михаилом Доливо-Добровольским (на немецкий лад Michael von Dolivo-Dobrowolsky) и представил 8 марта 1889 заявление на патентование короткозамкнутого асинхронного двигателя. После этого началось широкое применение надежных и высокоэффективных двигателей переменного тока. В настоящее время все вышеназванные электродвигатели достигли очень высокого технического уровня и находят широчайшее применение в стационарных установках, а в последнее время все чаще и в средствах передвижения.
Наиболее характерное магнитное явление - притяжение магнитом кусков железа - известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые - отталкиваются друг от друга.
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
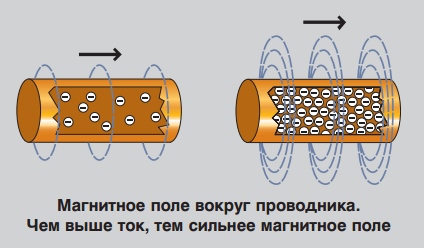
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
![]()
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
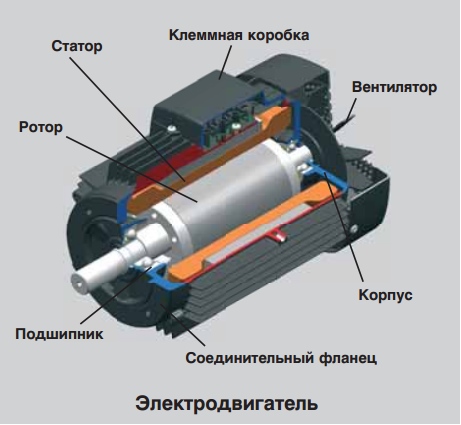
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
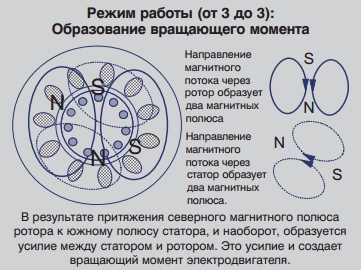
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса - притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.

Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток - AC
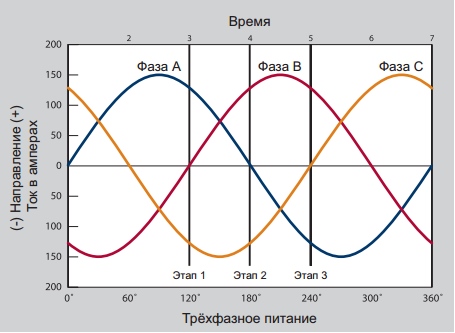
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание - это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

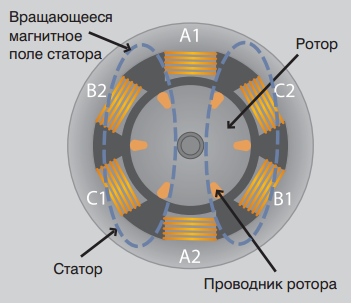
Для наглядности мы заменили ротор вращающимся магнитом, а статор - катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе - B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая - южным. Таким образом, если A1 - северный полюс, то A2 - южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
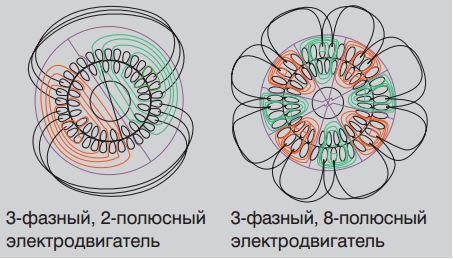
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
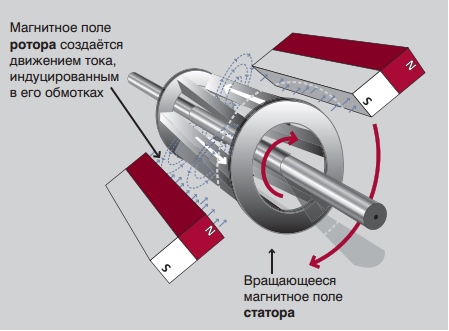
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.

Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция - это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
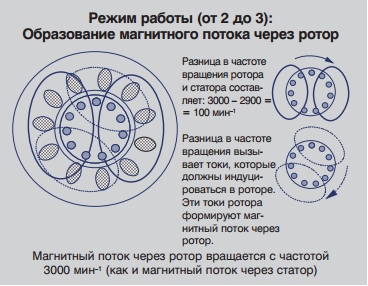
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

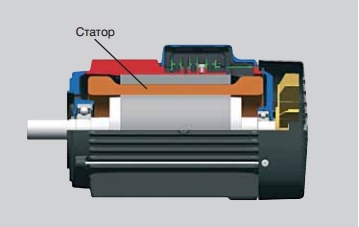
Статор элетродвигателя
Статор - это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью - из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры - класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
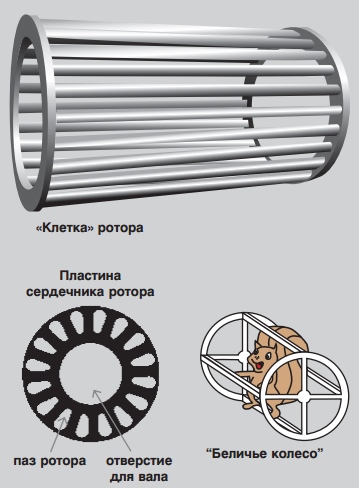
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.

Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
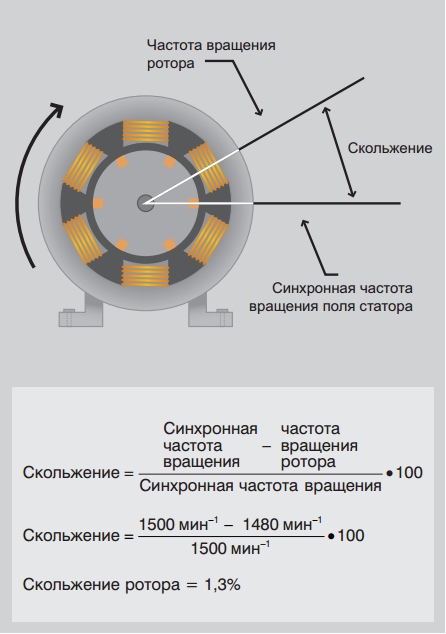
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
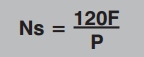
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.