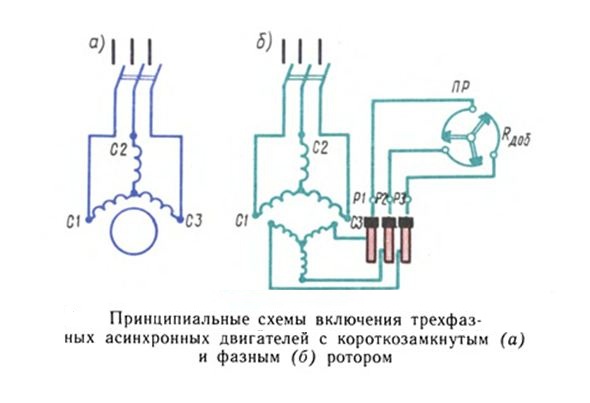
3 фазный асинхронный двигатель. Короткозамкнутый и фазный ротор - в чем различие
(рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Ф п одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной - шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но




и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности - открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора . Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-

тором расстоянии у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки. Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны - одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной .
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр.). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
Обмотка ротора. Обмотка ротора выполнена в виде беличьей клетки (рис. 256,а). Она сделана из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 256,б). Стержни этой обмотки вставляют в пазы ротора без какой-либо изоляции, так как напряжение в короткозамкну-


той обмотке ротора равно нулю. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности - закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
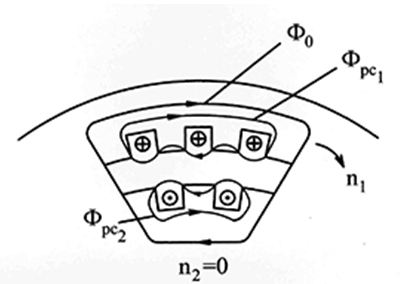
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные
![]()
сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением. По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т. е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4-5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20-30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10- 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Предлагаем рассмотреть принцип действия асинхронного электродвигателя с короткозамкнутым ротором, трехфазного и однофазного типа, а также его конструкцию и схемы подключения.
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора – роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
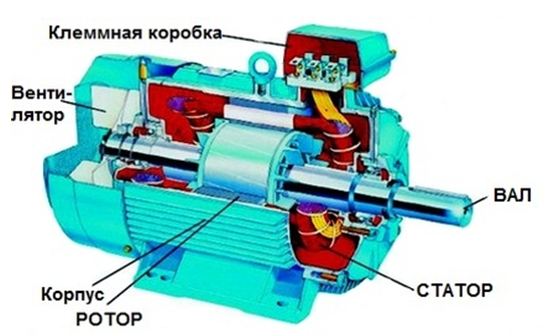
Конструкция асинхронного двигателя
Направление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.

Когда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет. Формула
QC = U с I 2 = U 2 I 2 / sin 2

Схема: Подключение асинхронного двигателя
Из которой следует, что электрические машины переменного тока двухфазного или однофазного типа, должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления. Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.

Похожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Относительно небольшой пусковой момент.
Асинхронный двигатель с фазным ротором имеет очень обширную область обслуживания. АД (асинхронный двигатель) чаще применяется в управлении двигателями большой мощности. Обслуживание и управление приводов мельниц, станков, насосов, кранов, дымососа, дробилок. Асинхронный двигатель с массивным ротором даёт возможность подключения множества технических механизмов.
- Схема подключения
- Устройство двигателя
- Принцип работы
- Расчёт числа повторений
- Реостатный пуск
Характеристика асинхронного двигателя
Преимущества использования:
- Запуск двигателя с нагрузкой, подключение к валу благодаря созданию большого момента вращения. Это обеспечивает обслуживание асинхронных двигателей с фазовым элементом любой мощности.
- Возможность постоянной скорости вращения большой или маленькой нагрузки
- Регулирование автоматического пуска.
- Работа даже при перегрузке тока напряжения.
- Простота использования.
- Невысокая стоимость.
- Надёжность применения.
Недостатки применения
- Использование резисторов увеличивается стоимость, а работа двигателя усложняется;
- Большие размеры;
- Значение КПД меньше, чем короткозамкнутых роторов;
- Трудное управление скоростью вращения;
- Регулярный капитальный ремонт.
Схема подключения
При подключении к току начинают работать реле времени. Контакты размыкаются. При нажатии тумблера происходит пуск.
Чтобы подключить АД нужно правильно обозначить концы и начала обмоток фазы.
Устройство двигателя
Главными постоянными являются статор и ротор. Статор представляет собой цилиндр, состав –листы электротехнической стали, в цилиндр уложена трёхфазная обмотка. Она состоит из обмоточной проволоки. Которые соединены между собой в виде звезды или треугольника в зависимости от напряжения.
Ротор – основная вращающаяся часть двигателей. Он в зависимости от расположения может быть внешним, внутренним. Данный элемент состоит из стальных листов. Пазы сердечника наполнены алюминием, который имеет стержни, содержащие торцевые кольца. Они могут быть латунными или стальными, каждое из них изолировано слоем лака. Между трёхфазным статором и ротором образуется зазор. Регулирование размер зазора от 0,30 –0,34 мм в устройствах с небольшим напряжением, 1,0–1,6 мм в устройствах с большим постоянным электрическим напряжением. Конструкция имеет название «беличья клетка». Для мощных двигателей используется медь в сердечнике. Контактор начинает действие, двигатель заводится.
Существует добавочный резистор в цепи обмотки вращающей части машины, крепится с помощью металлографитных щеток. Щетки обычно используются две, расположены на щеткодержателе. В приводах кранах и центрифугах для регулирования роботы применяется конический подвижный ротор. Асинхронные двигатели с фазным ротором незаменимы при технических требованиях мощного пускового момента. Это могут быть такие механизмы, как кран, мельница, лифт.
Принцип работы
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности. При статорном вращении возникает электродвижущая сила.
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
f 1 – частота электричества$
p – количество полюсных пар каждой обмотки статора.
m 2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
Асинхронный электродвигатель работает только при асинхронной частоте.
При одновременном вращении статора и ротора, расчет скольжения будет равняться нулю.
Двухроторный АД используется для привода разных механизмов. Различие двухроторного двигателя заключается присутствием в конструкции двух роторов. Второй ротор выполняет функцию вспомогательную, может вращаться с другой скоростью. Вспомогательный ротор представляет собой внутренний хомут для замыкания постоянного потока магнитов, охлаждения электродвигателя. Недостаток двухмоторного асинхронного двигателя в низком КПД от использования ферромагнитного вспомогательного ротора.
В ходе исследования двухроторных машин достигаются близкие данные скоростик желаемым, когда вспомогательный ротор имеет максимальные вентиляционные зазоры. Полый ротор установлен на ступице, его вал расположен внутри цилиндра. При вращении вспомогательного ротора вентиляция работает по принципу центробежного вентилятора. Для увеличения пускового момента и большей электрической нагрузки полый ротор должен регулироваться, перемещаясь вдоль вала, с установленным штифтом, конец чего входит в паз ступицы ротора.
Данные для расчета:
Реостатный пуск
Часто для включения двигателя безмощных пусковых моментов оказывают нужное действие реостаты. Схема реостатного способа:
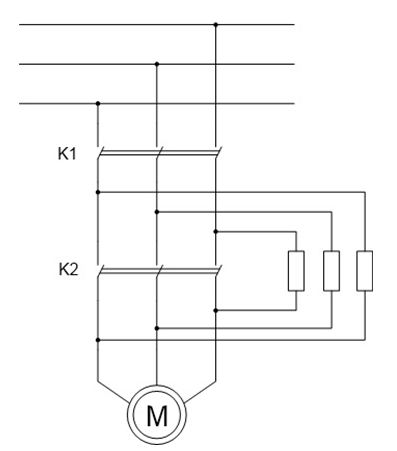
Главной характеристикой метода является присоединение двигателя при пуске к реостатам. Реостаты разрываются (на чертеже К1), на них идет частично электрический ток. Что дает возможность уменьшить пусковые токи. Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Ремонт и характеристики неисправностей
Причиной ремонта могут служить внешние и внутренние причины.
Внешние причины ремонта:
- обрыв провода или нарушение соединений с электрическим током;
- сгорание предохранителей;
- понижение или повышения напряжения;
- перегруженность АД;
- неравномерная вентиляция в зазоре.
Внутренняя поломка может возникнуть по механическим и электрическим причинам.
Механические причины ремонта:
- неправильное регулирование зазора подшипников;
- повреждение вала ротора;
- расшатывание щеткодержателей;
- возникновение глубоких выработок;
- истощение креплений и трещины.
Электрические причины ремонта:
- замыкания витков;
- поломка провода в обмотках;
- пробивание изоляции;
- пробой пайки проводов.
Данные причины – это далеко не полный список поломок.
Асинхронный двигатель – незаменимый и важный механизм, применяемый для обслуживания быта и различных отраслей промышленности. Для практического действия АД с фазным ротором необходимо знать техническую характеристику управления, использовать его по назначению и регулярно проводить ремонт при технических осмотрах. Тогда асинхронный двигатель станет практически вечной эксплуатации.
Устройство статора. Асинхронный двигатель, как и всякая электрическая машина, состоит из статора и ротора (рис. 3.1, а). Статор имеет цилиндрическую форму. Он состоит из корпуса /, сердечника 2 и обмотки 3. Корпус литой, в большинстве случаев стальной или чугунный. Сердечник статора собирается из тонких листов электротехнической стали (рис. 3.1,б).
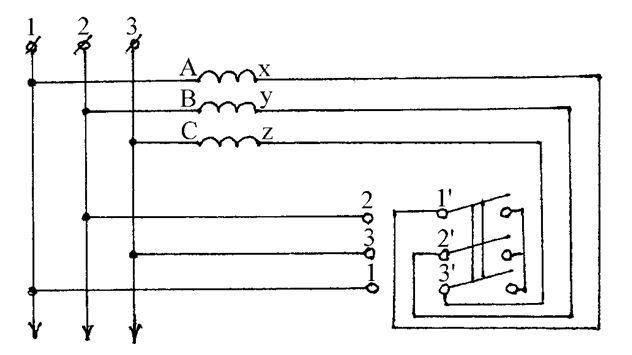
Листы для машин малой мощности ничем не покрываются, так как образующийся на листах оксидный слой является достаточной изоляцией. Собранные листы стали образуют пакет статора, который запрессовывается в корпус статора. На внутренней поверхности сердечника вырубаются пазы, в которые укладывается обмотка статора. Обмотки статора могут соединяться звездой или треугольником. Для осуществления таких соединений на корпусе двигателя имеется коробка, в которую выведены начала фаз С1 , С2, СЗ и концы фаз С4, С5, С6. На рис. 3.2, а-в показаны схемы расположения этих выводов и способы соединения их между собой при соединении фаз звездой и треугольником. Схема соединений обмоток статора зависит от расчетного напряжения двигателя и номинального напряжения сети. Например, в паспорте двигателя указано 380/220. Первое число соответствует схеме соединения обмоток в звезду при линейном напряжении в сети 380 В, а второе - схеме соединения в треугольник при линейном напряжении сети 220 В. В обоих случаях напряжение на фазе обмотки будет 220 В.

Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессованы подшипники вала ротора.
Устройство ротора.
Ротор асинхронного двигателя состоит из стального вала 4
(рис. 3.1, а), на который напрессован сердечник 5,
выполненный, как и сердечник статора, из отдельных листов электротехнической стали с выштампованными в них закрытыми или полузакрытыми пазами. Обмотка ротора бывает двух типов: короткозамкнутая и фазная – соответственно роторы называются короткозамкнутыми и фазными.
Большее распространение имеют двигатели с короткозамкнутым ротором, так как они дешевле и проще в изготовлении и в эксплуатации. Токопроводящая часть такого ротора, названного М. О. Доливо-Добровольским ротором с беличьей клеткой, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов (рис. 3.3). Как правило, беличья клетка формируется путем заливки пазов ротора расплавленным алюминием.
Фазный ротор (рис.3.4) имеет три обмотки, соединенные в звезду. Выводы обмоток подсоединены к кольцам 2, закрепленным на валу 3. К кольцам при пуске прижимаются неподвижные щетки 4, которые подсоединяются к реостату 5.
В настоящее время, на долю асинхронных двигателей приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. К ним относятся и трехфазные асинхронные двигатели.
Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п.
Достоинства асинхронных электродвигателей
Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Устройство асинхронных электродвигателей с фазным ротором
Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором.
Статор трехфазного асинхронного двигателя состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов.
Фазы обмотки можно соединить по схеме в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют "звездой". Если же напряжение сети 220 В, то обмотки соединяют в "треугольник". В обоих случаях фазное напряжение двигателя равно 220 В.
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.

В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).

Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Принцип работы асинхронных электродвигателей
Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся , угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1

Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
