Принцип работы электродвигателя параллельного возбуждения. Принцип и схема работы двигателя постоянного тока с параллельным возбуждением
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ;
с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря;
с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря;
со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая - последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов.
Электродвигатель с независимым возбуждением . В этом электродвигателе (рис. 125, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения - к вспомогательному источнику в напряжением U B . В цепь обмотки возбуждения включен регулировочный реостат R рв, а в цепь обмотки якоря - пусковой реостат R П. Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой - для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения I в не зависит от тока I я в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. При этом условии согласно формулам (63′) и (65) получим, что зависимости электромагнитного момента М и частоты вращения п от тока I я будут линейными (рис. 126, а). Следовательно, линейной будет и механическая характеристика двигателя - зависимость п (М) (рис. 126,б).
При отсутствии в цепи якоря реостата с сопротивлением R П скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения I я? R я в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3-5 % от U HOM . Эти характеристики (прямые 1 на рис. 126, а и б) называются естественными . При включении в цепь якоря реостата с сопротивлением R П угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным
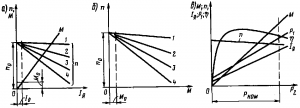
значениям R п1 , R п2 и R п3 . Чем больше сопротивление R п, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат R рв позволяет изменять ток возбуждения двигателя I в и его магнитный поток Ф. Как следует из формулы (65), при этом будет изменяться и частота вращения п. В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения, как следует из формулы (65), резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря I я [см. формулу (66)] и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания. Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Ф ост от остаточного магнетизма) и э. д. с. Е и возрастает ток I я. А так как приложенное напряжение U остается неизменным, то частота вращения п будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E=U - I я? R я).
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается [см. формулу (63")] и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток I я [так как в формуле (64) э. д. с. Е будет равна нулю], и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n 0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I 0 , необходимый для компенсации внутренних потерь мощности (см. § 25), и развивает некоторый момент М 0 , требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше nо.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р 2 (рис. 126, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря I я и мощности Р 1 от Р 2 также практически линейны. Ток I я и мощность Р 1 при Р 2 = 0 представляют собой ток холостого хода I 0 и мощность Р 0 , потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин (см. § 37).
Электродвигатель с параллельным возбуждением. В этом электродвигателе (см. рис. 125, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат R рв, а в цепь обмотки якоря - пусковой реостат R п. В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения I в не зависит от тока обмотки якоря I в. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения I в и магнитного потока Ф, что приводит к увеличению тока обмотки якоря I я [см. формулу (66) ]. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель с последовательным возбуждением. Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат R п (рис. 127, а), а для регулирования частоты вращения
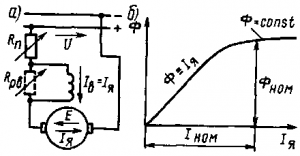
параллельно обмотке возбуждения может быть включен регулировочный реостат R рв. Характерной особенностью этого электродвигателя является то, что его ток возбуждения I в равен или пропорционален (при включении реостата R рв) току обмотки якоря I я, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 127,б).
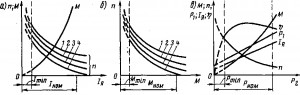
При токе обмотки якоря I я, меньшем (0,8-0,9) номинального тока I ном, магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току I я. Поэтому скоростная характеристика электродвигателя будет мягкая - с увеличением тока I я частота вращения n будет резко уменьшаться (рис. 128, а). Уменьшение частоты вращения n, как следует из формулы (65), происходит из-за увеличения падения напряжения I я?R я во внутреннем сопротивлении? R я цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока I я будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току I я. Поэтому при токе I я, меньшем (0,8-0,9) I ном, скоростная характеристика имеет форму гиперболы, а моментная - параболы.
При токах I я > I ном зависимости М и п от I я линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока I я меняться не будет.
Механическая характеристика, т. е. зависимость п от М (рис. 128,6), может быть построена на основании зависимостей n и М от I я. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением R п получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям R п1 , R п2 и R п3 ; при этом чем больше R п, тем ниже располагается характеристика. Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2-0,25) I ном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.). Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастаний тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением; поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением - только в 2 раза больше. В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости п и М от мощности Р 2 на валу электродвигателя (рис. 128, в), как следует из рассмотренных выше положений, являются нелинейными; зависимости P 1 , I я и? от Р 2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
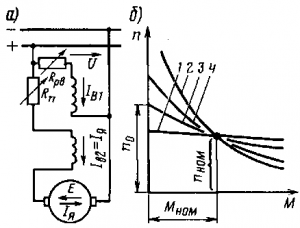
Электродвигатель со смешанным возбуждением. В этом электродвигателе (рис. 129, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения - параллельной (или независимой) и последовательной, по которым проходят токи возбуждения I в1 и I в2 = I я. Поэтому
Ф = Ф посл + Ф пар
Ф посл - магнитный поток последовательной обмотки, зависящий от тока I я;
Ф пар - магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения I в1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 129,б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2
(кривая 4 при малой м. д. с. параллельной обмотки). Достоинством двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Ф посл = 0. В этом режиме частота вращения его якоря определяется магнитным потоком Ф пар и имеет ограниченное значение (двигатель не идет вразнос).
Двигатель с параллельным возбуждением является наилучшим среди двигателей постоянного тока для привода механизмов, требующих почти постоянной частоты вращения и в то же время экономичного регулирования скорости. Схема этого двигателя показана на рис. 4-25.
Рис. 4-25. Двигатель параллельного возбуждения.
Зажимы пускового реостата обозначаются: Л - присоединяемый к линии (питающей сети); М - к зажимам обмотки возбуждения и Я - к зажимам якоря. Черными кружками (рис. 4-25) обозначены рабочие контакты, а пропуски между ними соответствуют секциям сопротивлений реостата. Металлическая дуга 3 при работе двигателя постоянно соединяет зажим Л с зажимами шунтового реостата, регулирующего ток возбуждения Перед замыканием рубильника Необходимо убедиться, что рычаг (подвижный контакт) 1 пускового реостата 2 стоит на холостом контакте 0. Подвижный контакт шунтового реостата в цепи возбуждения должен находиться в крайнем левом положении, при котором сопротивление реостата минимально.
При замыкании рубильника и переводе рычага пускового реостата на первый из рабочих контактов ток двигателя разветвляется на ток якоря и ток обмотки возбуждения
Таким образом, ток в питающей цепи
![]()
Первый бросок тока в зависимости от величины пускового сопротивления Под действием начального вращающего момента якорь начинает вращаться и с нарастанием скорости ток якоря уменьшается. Тогда рычаг пускового реостата, может быть переведен на второй контакт. При этом ток якоря, увеличившись броском, вызовет увеличение вращающего момента и дальнейшее приращение скорости, а затем вновь начинает уменьшаться. Тогда рычаг реостата переводят на следующий контакт и т. д. Пуск заканчивается, когда все сопротивление выведено и на якорь подано полное напряжение Сопротивление пускового реостата обычно рассчитано на кратковременную работу пуска и оставлять рукоятку реостата на промежуточных контактах длительно нельзя.

Рис. 4-26. Скоростные характеристики двигателя параллельного возбуждения.
Чем быстрее нарастает противо-э. д. с. якоря, тем скорее, уменьшается ток и тем меньше нагрев обмотки якоря. Поэтому пуск производят всегда при наибольшем токе возбуждения, замыкая, накоротко сопротивление регулировочного реостата (рис. 4-25). Тогда магнитный поток машины Ф и противо-э. д. с. будут максимальны. Кроме того, электродвигатель при пуске должен развивать повышенный вращающий, момент, а это может быть также при наибольшем магнитном потоке формула (4-8)].
Перед отключением двигателя переводят рычаг пускового реостата на нулевой контакт, а затем размыкают рубильник. Этим исключается подгорание контактов рубильника.
Скоростная характеристика двигателя при показана на рис. 4-26 кривой 1. При отсутствии механической нагрузки ток холостого хода и скорости наибольшая:
![]()
При увеличении нагрузки (момента сопротивления) на валу двигателя частота вращения падает незначительно, так как автоматическое увеличение вращающего момента происходит за счет увеличения тока в цепи якоря который согласно уравнению (4-14а) резко возрастает при незначительном уменьшении противо-э. д. с. вследствие малой величины сопротивления цепи якоря Такая характеристика называется жесткой.

Рис. 4-27. Рабочце характеристики двигателя параллельного возбуждения.
При неизменном токе возбуждения магнитный поток Ф можно считать приблизительно постоянным, так как влияние реакции якоря незначительно.
Тогда вращающий момент двигателя
приблизительно пропорционален току Поэтому если отложить М по оси абсцисс на рис. 4-26, то получится механическая характеристика двигателя, т. е.
Очень удобны для пользования рабочие характеристики (рис. 4-27), даваемые в каталогах и описаниях электродвигателя. Это
при , где - к. п. д. двигателя, а - полезная мощность на валу.
Развиваемая на валу мощность двигателя
![]()
а вращающий момент
![]()
При неизменной частоте вращения зависимость была бы прямой линией, проходящей через начало координат. Однако скорость при увеличении падает и момент не пропорционален Ток при неизменном U пропорционален мощности в цепи питания Так как потери двигателя малы, то ток приблизительно пропорционален .
Регулирование скорости двигателя с параллельным возбуждением обычно производится изменением тока возбуждения. Этот способ дает экономичное плавное регулирование в пределах 1: 1,5, а в специальном исполнении - до 1:8. Регулирование происходит следующим образом. Вращающий момент двигателя при Ф = const пропорционален току а ток
![]()
Вследствие малой величины падение напряжения в цепи якоря невелико. Поэтому при постоянных значениях U и якоря может значительно возрасти при небольшом уменьшении противо-э. д. с.
Например, при и при токе якоря противо-э. д. с. . Если противо-э. д. с. уменьшится всего на 10 В (примерно на 5%) и будет , то ток якоря , т. е. увеличится в 3 раза.
Таким образом, если при некоторой постоянной нагрузке и частоте вращения уменьшить ток возбуждения например на 5%, то. на столько же сразу уменьшатся магнитный поток Ф и противо-э. д. с. Е. Это вызовет резкое увеличение тока якоря и вращающего момента, причем избыточный момент пойдет на ускорение вращения якоря. Однако по мере нарастания скорости якоря противо-э. д. с. снова увеличится, ток якоря уменьшится до величины, при которой вращающий момент примет прежнее значение. Таким образом, при равенстве установится новая постоянная частота вращения, большая прежней.
При таком способе регулирования потери энергии в регулировочном реостате (мощность потерь Гвгв) очень малы, так как составляет всего
Этот способ позволяет изменять частоту вращения двигателя в сторону ее увеличения выше номинальной.
Если при неизменной нагрузке на валу двигателя включить добавочное сопротивление гл последовательно с обмоткой якоря, то в первый момент ток якоря уменьшится, отчего уменьшится вращающий момент и, так как момент сопротивления окажется больше, скорость уменьшится. Однако вследствие уменьшения скорости и противо-э. д. с. ток якоря станет возрастать, будет возрастать вращающий момент и при равенстве моментов дальнейшее снижение скорости прекратится.
Двигатель будет продолжать работать с постоянной, но пониженной частотой вращения. Этот способ - регулирования неэкономичен вследствие значительных потерь энергии в сопротивлении реостата.
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым , параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения , требуют два источника питания (рис.11.9,а). Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой - для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2 ). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения включаются в соответствии со схемой, показанной на рис.11.9,б. Зажимы Я1 и Я2 относятся к обмотке якоря, а зажимы Ш1 иШ2 - к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rв предназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи . В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось.
С увеличением частоты вращения добавочное (дополнительное) сопротивление Rд в цепи якоря следует уменьшать, а при достижении установившейся частоты вращения – вывести полностью.
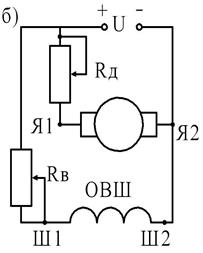
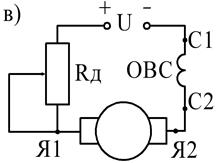
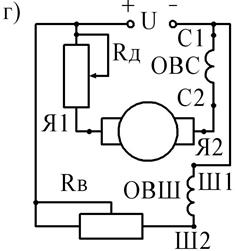
Рис.11.9. Виды возбуждения машин постоянного тока,
а - независимого возбуждения, б - параллельного возбуждения,
в - последовательного возбуждения, г - смешанного возбуждения.
ОВШ - обмотка возбуждения шунтовая, ОВС - обмотка возбуждения сериесная," ОВН - обмотка независимого возбуждения, Rд -дополнительное сопротивление в цепи обмотки якоря, Rв- дополнительное сопротивление в цепи обмотки возбуждения.
Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10...40 раз .
Важным свойством двигателя параллельного возбуждения служит практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% .
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1 , а при специальном исполнении двигателя - 6:1 . Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины - при значительном ослаблении магнитного потока двигатель может пойти «вразнос» .
Двигатели последовательного возбуждения (сериесные) включаются по схеме, (рис.11.9, в). Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря . Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5...2,5)Iн . После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается . В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя . Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту вращения в широких пределах.
Двигатели смешанного возбуждения (компаундные), занимают промежуточное положение между двигателями параллельного и последовательного возбуждения (рис.11.9, г). Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд . Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
Обозначение машин постоянного тока
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий .
Двигатели серий 2П и 4П подразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А . Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух длин (М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико - экономические показатели по сравнению с серией 2П . трудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5...3 раза. При этом расход меди снижается на 25...30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4А иАИ .
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
ПХ1Х2ХЗХ4 ,
где 2П - серия машины постоянного тока;
XI - исполнение по типу защиты: Н - защищенное с самовентиляцией, Ф - защищенное с независимой вентиляцией, Б - закрытое с естественным охлаждением, О - закрытое с обдувом от постороннего вентилятора;
Х2 - высота оси вращения (двухзначное или трехзначное число) в мм;
ХЗ - условная длина статора: М - первая, L - вторая, Г - с тахогенератором;
В качестве примера можно привести обозначение двигателя 2ПН112МГУ - двигатель постоянного тока серии 2П , защищенного исполнения с самовентиляцией Н ,112 высота оси вращения в мм, первый размер статораМ , укомплектован тахогенератором Г , используется для умеренного климатаУ .
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы :
Микромашины ………………………...меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,
Высокого напряжения……………выше 1000В.
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
Задание и методика выполнения работы.
1.Изучить устройство и назначение отдельных частей электрических машин постоянного тока.
2.Определить выводы машины постоянного тока, относящиеся к обмотке якоря и к обмотке возбуждения.
Выводы, соответствующие той или иной обмотке, могут быть определены мегомметром, омметром или с помощью электрической лампочки. При использовании мегомметра один его конец присоединяется к одному из выводов обмоток, а другим поочередно касаются к остальным. Измеренное сопротивление, равное нулю, укажет на соответствие двух выводов одной обмотки.
3.Распознать по выводам обмотку якоря и обмотку возбуждения. Определить вид обмотки возбуждения (параллельного возбуждения или последовательного).
Этот опыт можно осуществить с помощью электрической лампочки, подключаемой последовательно с обмотками Постоянное напряжение следует подавать плавно, постепенно повышая его до указанного номинального значения в паспорте машины.
С учетом малого сопротивления якорной обмотки и обмотки последовательного возбуждения лампочка загорится ярко, а их сопротивления, измеренные мегомметром (или омметром) будут практически равны нулю.
Лампочка, соединенная последовательно с параллельной обмоткой возбуждения, будет гореть тускло. Значение сопротивления параллельной обмоткой возбуждения должно находиться в пределах 0,3...0,5 кОм .
Выводы якорной обмотки можно распознать путем присоединения одного конца мегомметра к щеткам, касаясь при этом другим его концом к выводам обмоток на щитке электрической машины.
Выводы обмоток электрической машины следует обозначить на изображенной в отчете условной этикетке выводов.
 Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм
. Данные замеров отобразить в отчете.
Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм
. Данные замеров отобразить в отчете.
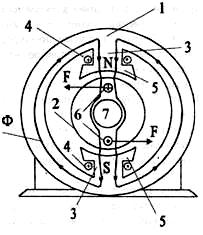
Изобразить условно в поперечном разрезе главные полюсы с обмоткой возбуждения и якорь с витками обмотки, находящимися под полюсами (подобно рис.11.10). Самостоятельно принять направление тока в обмотках возбуждения и якоря. Указать при этих условиях направление вращения двигателя.
Рис. 11.10. Двухполюсная машина постоянного тока:
1 - станина; 2 -якорь; 3 - главные полюсы; 4 - обмотка возбуждения; 5 - полюсные наконечники; 6 - обмотка якоря; 7 - коллектор; Ф - основной магнитный поток; F - сила, действующая на проводники обмотки якоря.
Контрольные вопросы и задания для самостоятельной подготовки
1: Объяснить устройство и принцип действия двигателя и генератора постоянного тока.
2. Пояснить назначение коллектора машин постоянного тока.
3.Дать понятие полюсного деления и привести выражение для его определения.
4.Назвать основные виды обмоток, применяемых в машинах постоянного тока, и знать способы их выполнения.
5.Указать основные достоинства двигателей параллельного возбуждения.
6.Каковы конструктивные особенности обмотки параллельного возбуждения по сравнению с обмоткой последовательного возбуждения?
7.В чем особенность пуска двигателей постоянного тока последовательного возбуждения?
8.Сколько параллельных ветвей имеют простая волновая и простая петлевая обмотки машин постоянного тока?
9.Как обозначаются машины постоянного тока? Привести пример обозначения.
10.Какой величины допускается сопротивление изоляции между обмотками машин постоянного тока и между обмотками и корпусом?
11.Какой величины может достигнуть ток в момент пуска двигателя при отсутствии дополнительного сопротивления в цепи обмотки якоря?
12.Какой величины допускается пусковой ток двигателя?
13.В каких случаях допускается пуск двигателя постоянного тока без дополнительного сопротивления в цепи обмотки якоря?
14.За счет чего можно изменить ЭДС генератора независимого возбуждения?
15.Каково назначение дополнительных полюсов машины постоянного тока?
16.При каких нагрузках допускается включение двигателя последовательного возбуждения?
17.Чем определяется величина основного магнитного потока?
18.Написать выражения ЭДС генератора и момента вращения двигателя. Дать понятие входящих в них составляющих.
ЛАБОРАТОРНАЯ РАБОТА 12.
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника - сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах , которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0-1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
Рис. 1. Схемы генераторов постоянного тока: а - с независимым возбуждением; б - с параллельным возбуждением; в - с последовательным возбуждением; г - со смешанным возбуждением П - потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения - параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов.
большой мощности выполняются обычно с независимым возбуждением
. У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика - единицы процентов от основной МДС.
Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Двигатели постоянного тока (ДПТ) устанавливаются в автомобилях: в вентиляторах и различных приводах. Они почти всегда используются на электротранспорте и реже в производстве.
Преимущества ДПТ по сравнению с асинхронными моторами:
- Хорошо поддаются регулировке.
- Отличные пусковые свойства.
- Частоты вращения могут быть более 3000 об/мин.
Недостатки ДПТ:
- Низкая надежность.
- Сложность изготовления.
- Высокая стоимость.
- Большие затраты на обслуживание и ремонт.
Принцип действия электродвигателя постоянного тока
Устройство двигателя аналогично синхронным двигателям переменного тока. Повторяться не буду, если не знаете, тогда смотрите в этой нашей .
Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами. Для создания непрерывного вращения необходимо постоянно менять местами полярность обмотки якоря. Чем и занимается коллектор, который при вращении коммутирует обмотки якоря. Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.
Принципиальные схемы электродвигателя постоянного тока
Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения.
В зависимости от того как подключен якорь и ОВ , электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным.
На производстве применяются
двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания.  Между обмотками возбуждения и якоря нет электрической связи.
Между обмотками возбуждения и якоря нет электрической связи.
Схема подключения с параллельным возбуждением
по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания.  Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Моторы с последовательным возбуждением
применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно. 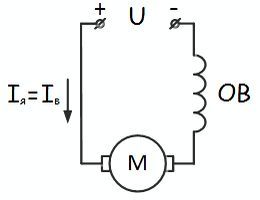 При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал.
При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал.
Иногда применяются ДПТ со смешанным возбуждением
, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно.  В жизни редко встречается.
В жизни редко встречается.
Реверсирование двигателей постоянного тока
Что бы изменить направление вращение ДПТ с последовательным возбуждением необходимо поменять направления тока в ОВ или обмотке якоря. Практически, это делается изменением полярности: меняем плюс с минусом местами. Если же поменять одновременно полярность в цепях возбуждения и якоря, тогда направление вращения не изменится. Аналогично делается реверс и для моторов, работающих на переменном токе.
Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов.
Регулирование оборотов двигателей постоянного тока
ДПТ с последовательным возбуждением
проще всего регулировать переменным сопротивлением в цепи якоря. Регулировать можно только на уменьшение числа оборотов в соотношении 2:1 или 3:1. При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе.  В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем.
Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения.
На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления.
Похожие материалы.
